CN
CN
Aviso relativo a la adquisición del negocio de comercio exterior de Touch Foil


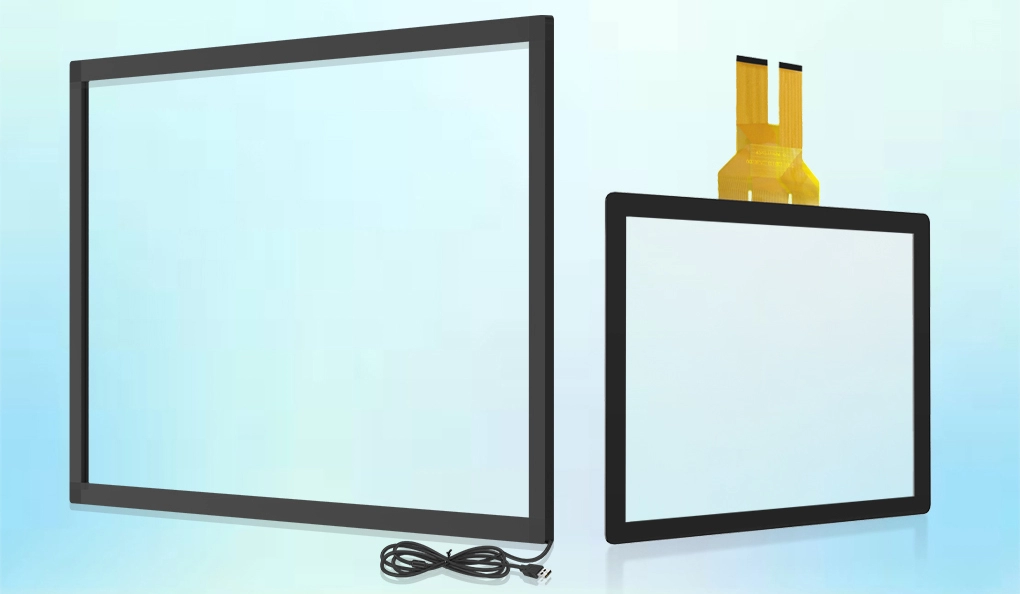
El principio de funcionamiento, tanto para pantallas táctiles resistivas de 4 hilos como de 5 hilos, se basa principalmente en la detección de presión para controlar el contenido de la pantalla. La pantalla táctil está compuesta por una película multicapa que se adapta perfectamente a la superficie. La primera capa es de vidrio o plexiglás. La segunda capa es una capa divisoria, la tercera es una capa superficial de resina multicomponente y la superficie está recubierta con una capa conductora transparente. Esta última está cubierta por una capa de plástico endurecido, liso y resistente a los arañazos. La capa conductora y el sensor de vidrio, situados sobre la capa superficial de poliéster, están separados por numerosos espaciadores diminutos. La corriente eléctrica fluye a través de la capa superficial. Al tocar ligeramente la capa superficial, se activa la capa inferior, y el controlador lee la corriente correspondiente y calcula la distancia de la posición del dedo.

Esta pantalla táctil utiliza dos capas conductoras altamente transparentes para formar la pantalla táctil, con una distancia entre ellas de tan solo 2,5 micras. Al tocar la pantalla con el dedo, las dos capas conductoras, normalmente aisladas entre sí, entran en contacto en el punto de contacto. Dado que una de las capas conductoras está conectada a un campo de voltaje uniforme de 5 V en la dirección del eje Y, el voltaje de la capa de detección cambia de cero a 1 V. Si el voltaje no es cero, el controlador detecta esta conexión, realiza una conversión analógica-digital y compara el valor de voltaje obtenido con 5 V para obtener la coordenada del eje Y del punto de contacto, y de forma similar obtiene la coordenada del eje X. Este es el principio básico común a todas las pantallas táctiles con tecnología resistiva.